


D3PM-1100-P15 Delta robot
Toote omadused
Iseloomulik
1. Tavaline tsükliaeg on alla 0,6 s, mis vastab teie püüdlustele suure kiiruse ja minimaalse helitugevuse poole.
2. Liikuva platvormi pöörleva mootori täiustatud disain võimaldab robotil hõlpsasti saavutada suurt pöörlemistäpsust.
3、Robot sobib ideaalselt kitsas ruumis töötamiseks, samuti kiireks ja suure täpsusega 3C-väljal.Laialdaselt kasutatav väikeste detailide kokkupanemisel, käsitsemisel ja katsetamisel.
Toote parameetrid
| Tüüp | D3PM-1100-P15 | |
| Kirved | 3+1 | |
| Kasulik koormus | 15 kg | |
| Manipulaator | Kaal | 113 kg |
| Läbimõõt | 1100 mm | |
| Korratavus | positsioon | 0,05 mm |
| Pöörlemine | 0,025° | |
| Maksimum kiirus | 350 pp/min | |
| Pöörlemisvahemik | ±360 | |
| Lubatud maksimaalne inertsimoment | 0,224 kg .m2 | |
| Käivitatava käe nurgavahemik | Üles | 23,5º |
| Alla | 70º | |
| Toiteallikas | Kolmefaasiline 380 VAC -10%~+10%, 49~61HZ | |
| Võimsusvõimsus | 10KVA | |
| Hinnatud jõud | 6,2kw | |
| Säilitustemperatuur | -10 ℃ ~ 70 ℃ | |
| Töökeskkond | -10℃~50℃,RH≤80% | |
| Kaitse | IP55 | |
Toote joonis
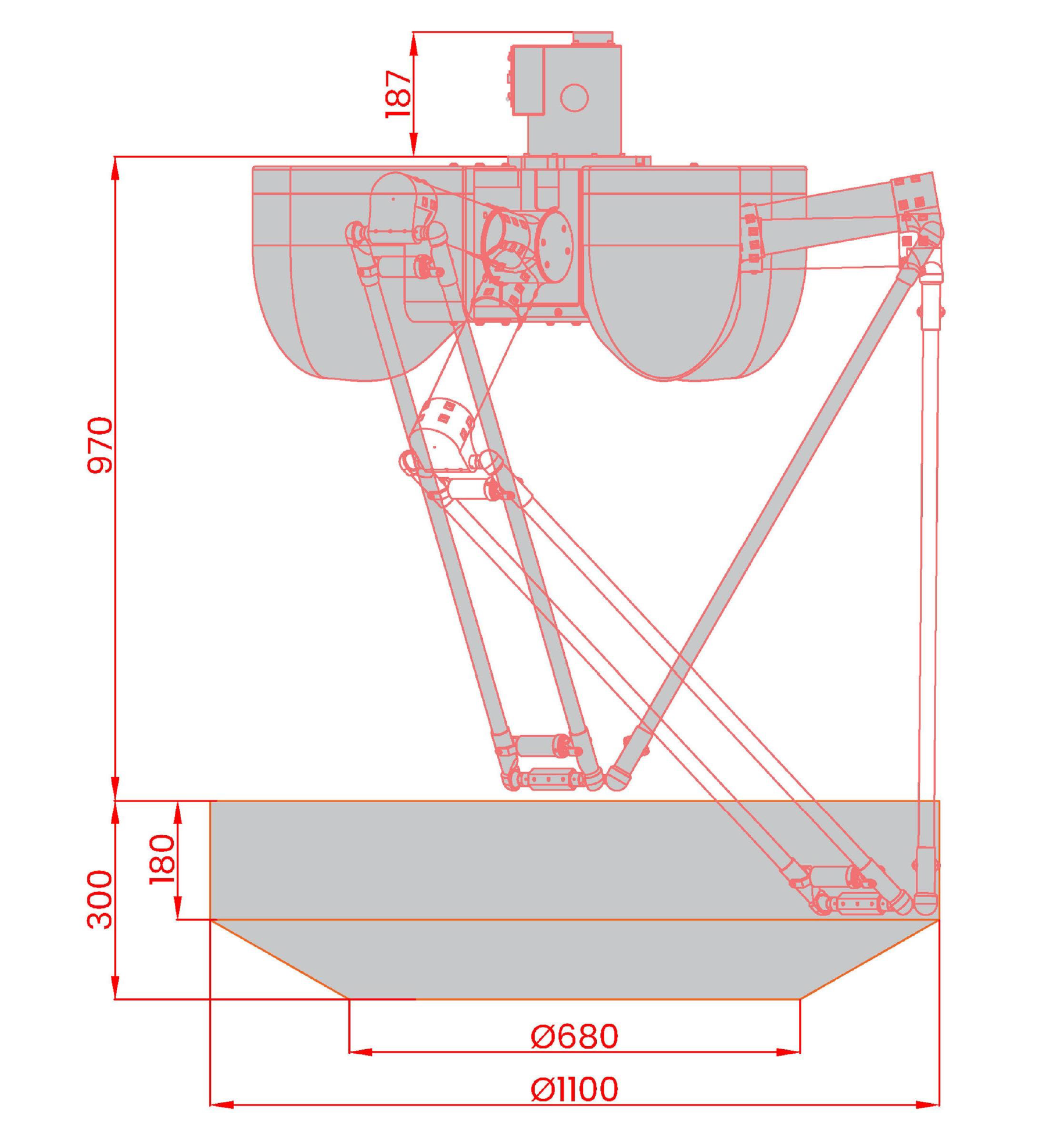
01. Mõõtmed ja tööpiirkond (mm)
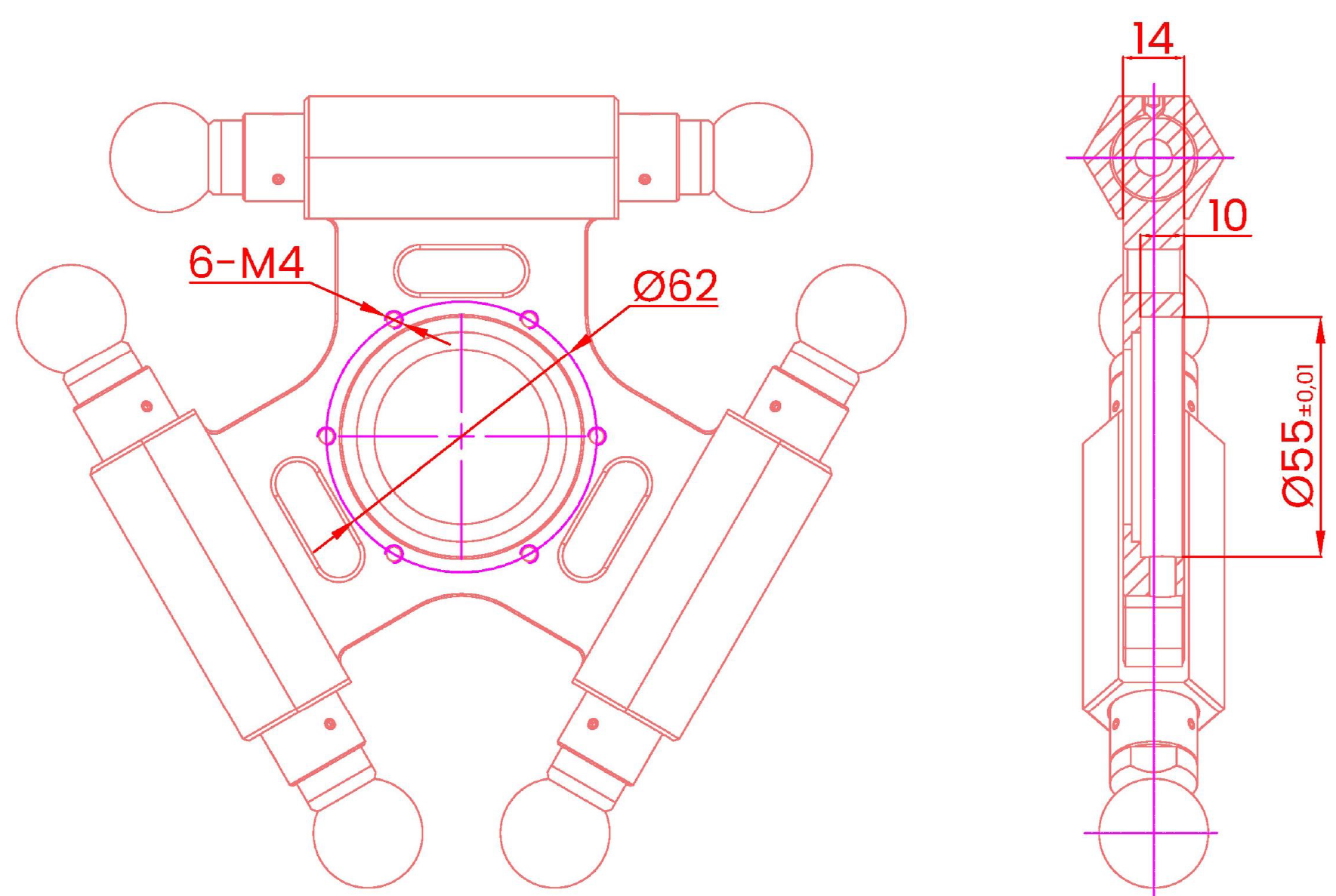
02. Äärik (mm)
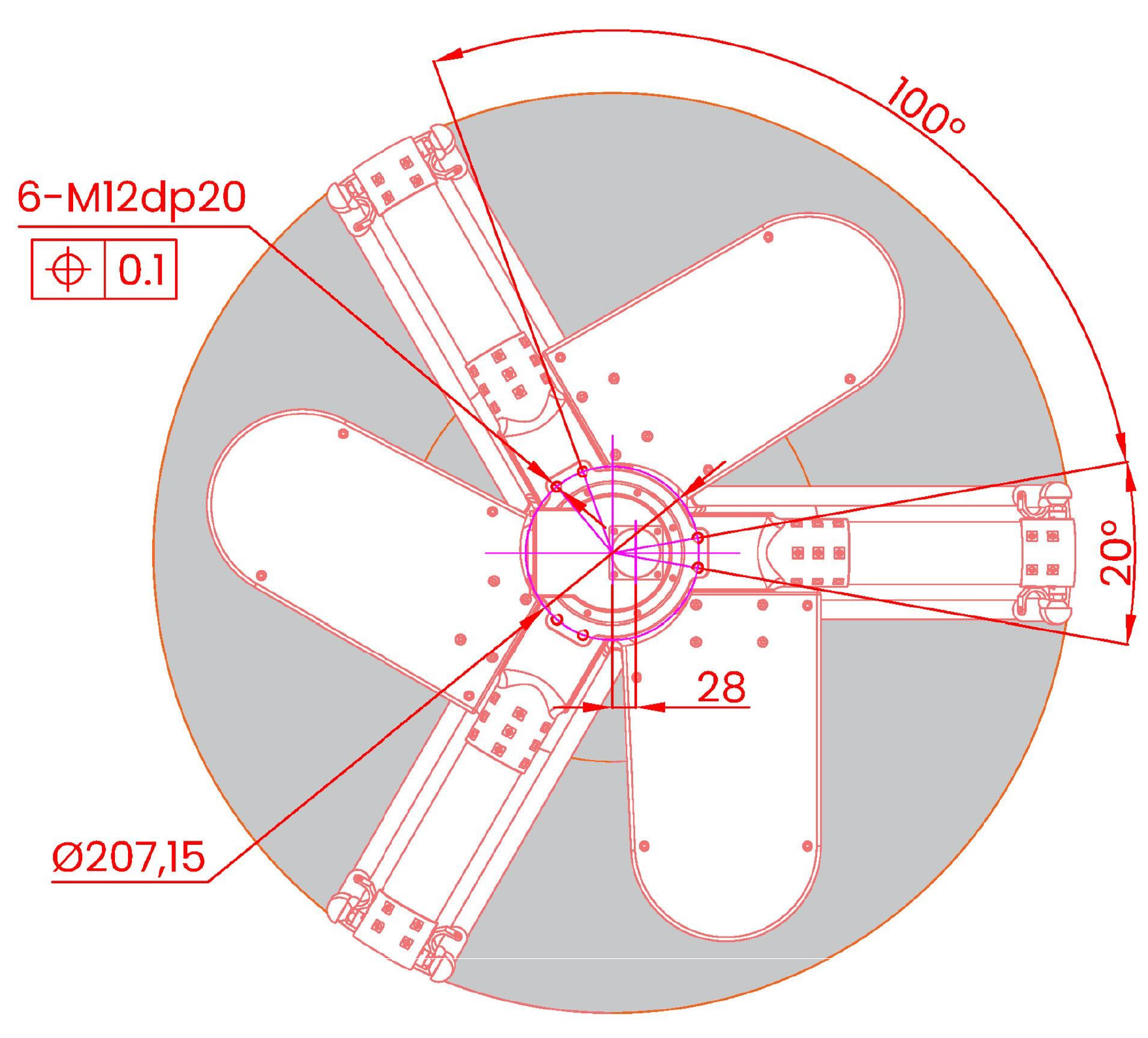
03. Aluse paigaldus (mm)
Kirjutage oma sõnum siia ja saatke see meile





